
Эксперимент «Северный морской путь»

Сроки эксперимента:
Первый эксперимент проходил со второй половины августа по первую половину сентября 2006 года.Второй эксперимент проходил с 28 августа по 16 сентября 2011 года.
Задачи эксперимента:
- Тестирование образцов НАП, в том числе и с использованием дифференциального режима навигации
- Оценка точности построения траекторий движения судна на основании апостериорной обработки данных различных двухчастотных (L1, L2) ГЛОНАСС/GPS приемников
- Оценка реальной навигационной обстановки в процессе перехода
- Отработка технологии обмена данными между мобильным пунктом мониторинга (на корабле) и ИАЦ КВНО
Трасса:
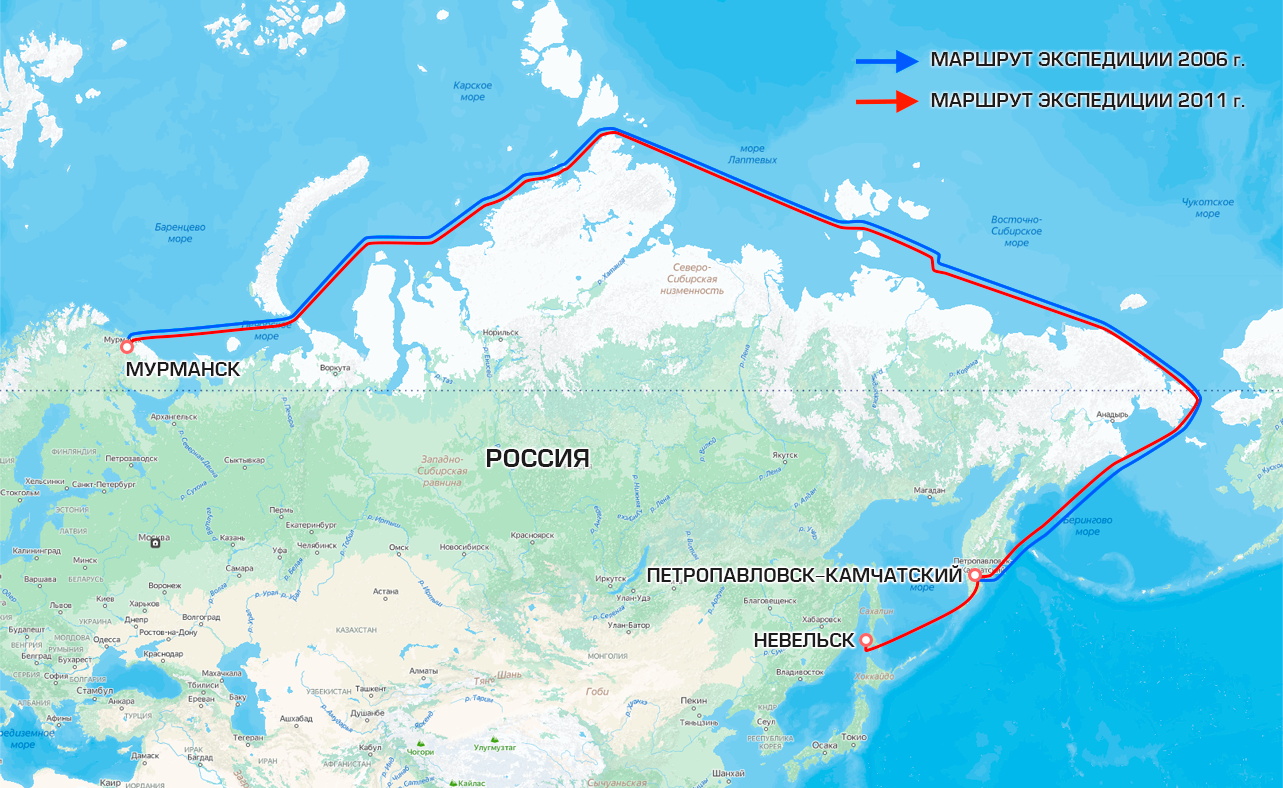
Эксперимент 2006 года: сквозной переход по Северному морскому пути из Мурманска в Петропавловск-Камчатский.Эксперимент 2011 года: сквозной переход по Северному морскому пути из Мурманска через Петропавловск-Камчатский в Невельск.



Сообщения, поступавшие с судна во время эксперимента 2011 года
16.09.2011
Описание эксперимента
В переходе 2011 года принимали участие специалисты ИАЦ КВНО А.А. Бермишев и В.Л. Лапшин.

А.А. Бермишев

В.Л. Лапшин
В переходе 2006 года принимали участие специалисты ИАЦ КВНО И.В. Вороновский и А.А. Бермишев.

А.А. Бермишев

И.В. Вороновский
В эксперименте тестировались образцы навигационной аппаратуры отечественных и зарубежных производителей – КБ «НАВИС», РИРВ, НИИ КП, Ижевского Радиозавода, «Радио Комплекс», Javad GNSS, Leica.
В подготовке эксперимента принимал участие Научно-производственный центр «Технологическая лаборатория» (г. Мытищи Московской области)
Результаты эксперимента «Северный морской путь» 2011 года
Получены оценки навигационной обстановки вдоль трасс СМП
Расчетные характеристики навигации с использованием сигналов спутниковых навигационных систем для трассы перехода по Северному морскому пути в августе-сентябре 2011 года получены на основе официальных альманахов ГНСС ГЛОНАСС и GPS с учетом состояния спутников и координат корабля.
Использовались следующие характеристики качества навигационной обстановки:
- Количество видимых спутников ГЛОНАСС при угле места 5º
- Геометрические факторы PDOP, HDOP и VDOP для ГНСС ГЛОНАСС, характеризующие полную точность позиционирования PDOP, точность позиционирования в плане HDOP и по высоте VDOP
- Количество видимых спутников GPS при угле места 5º
- Геометрические факторы PDOP, HDOP и VDOP для ГНСС GPS
В таблице приведены сравнительные характеристики качества навигации по ГНСС ГЛОНАСС и GPS — средние, минимальные и максимальные значения количества видимых спутников и геометрических факторов в течение суток в период с 29 августа по 09 сентября 2011 года.
Сравнительные характеристики качества навигации по ГЛОНАСС и GPS

На основании анализа представленных данных можно сделать вывод, что условия навигации с использованием ГНСС ГЛОНАСС и GPS на трассе перехода в указанный период времени являлись весьма благоприятными. Так, горизонтальный геометрический фактор HDOP, характеризующий точность навигационных определений в плане, вообще является идеальным как по системе GPS, так и по системе ГЛОНАСС.
Ниже представлены кривые характеристик качества навигации по ГНСС ГЛОНАСС и GPS за период 29.08.2011 — 09.09.2011, также показано количество «рабочих» спутников ГНСС ГЛОНАСС и GPS по данным альманахов.

Рис 1. Изменение характеристик навигации по ГНСС ГЛОНАСС и GPS в период с 29.08.2011 — 09.09.2011 года.
В период 06.09.2011 — 08.09.2011 наблюдались локальные ухудшения условий навигации по ГНСС ГЛОНАСС. В этот период зафиксированы локальные «всплески» значений параметров PDOP и VDOP. Область, в которой наблюдались локальные ухудшения качества навигации с использованием ГНСС ГЛОНАСС, распологалась в районе Чукотского полуострова.

Рис 2. Область ухудшения качества навигации при использовании ГНСС ГЛОНАСС
Причиной локальных ухудшений качества навигации по ГНСС ГЛОНАСС в указанный период времени являлось уменьшение количества «рабочих» спутников ГНСС ГЛОНАСС до 22.
Подводя итоги, можно отметить, что величина PDOP, характеризующая точность позиционирования, на всем протяжении перехода по системам ГЛОНАСС и GPS, практически одинакова, и не превышает 3, что характеризует данную точность как отличную и достаточную для использования результатов измерений в достаточно чувствительной аппаратуре и программах. При этом данная точность обеспечивается меньшим количеством видимых спутников ГЛОНАСС, чем у GPS.
Получены оценки позиционирования отечественных образцов навигационной потребительской аппаратуры в различных режимах навигации
Для одночастотных образцов тестируемых приемников оцениваемыми параметрами являлись ошибки позиционирования в плане и по высоте. Использовались общепринятые статистические характеристики ошибок, в том числе среднее значение, стандартное отклонение (центрированное СКО), RMS, вероятная круговая ошибка CEP.
Последовательность действий при вычислении статистических характеристик ошибок позиционирования НАП:
- Разбивка по группам NMEA-сообщений каждого НАП по типам режимов функционирования – ГЛОНАСС, GPS, ГЛОНАСС + GPS, абсолютный режим, дифференциальный режим при работе по каждой ККС.
- Сравнение результатов позиционирования выделенной группы каждого НАП с координатами контрольной траектории в синхронные моменты времени, вычисление невязок между результатами позиционирования НАП и координатами контрольной траектории с учетом введения поправок из-за разнесения антенн.
- Вычисление статистических характеристик для каждой группы невязок.
На рисунках, представленных ниже, для пяти образцов НАП, участвовавших в эксперименте, условно обозначенных НАП № 1÷ НАП № 5, представлены диаграммы с результатами оценки точности позиционирования в абсолютном режиме за все время эксперимента. НАП № 4 и НАП № 5 на протяжении всего перехода работали в режиме ГЛОНАСС + GPS.

Рис 3. Ошибка в плане (CEP)

Рис 4. Ошибка в плане (RMS)

Рис 5. Ошибка по высоте (RMS)
Экспериментально полученные точности, в основном, подтверждают точности позиционирования, заявленные в эксплуатационных документах на данные НАП. Все НАП продемонстрировали уверенную работу в режиме ГЛОНАСС. Как и следовало ожидать, точность позиционирования в режиме ГЛОНАСС пока еще несколько хуже, чем в режиме GPS, но уже вполне соизмерима с последней.
Особенности работы НАП, которые иногда приводили к заметным увеличениям ошибок позиционирования, показанные стрелками на рис 2. и рис 3., связаны с некоторыми недоработками в программном обеспечении НАП, которые на момент проведения эксперимента являлись опытными образцами. Так, стрелка на рис 2. указывает на повышенный уровень ошибок позиционирования при работе НАП № 3 по GPS, а стрелки на рис 3. — на повышенный уровень ошибок определения высоты у НАП № 2 и НАП № 5. Все особенности работы НАП и полученные оценки точности переданы разработчикам данной аппаратуры.
Получены оценки качества работы контрольно-корректирующих станций, расположенных на побережьях Северного ледовитого и Тихого океанов
На рисунке 6 показана траектория движения корабля и расположенные вдоль нее российские ККС. Участки траектории, выделенные синим цветом, соответствуют работе хотя бы одной из НАП в дифференциальном режиме, красным цветом – в абсолютном режиме, кругами отмечены номинальные зоны действия ККС.

Рис 6. Расположение российских ККС вдоль трассы перехода
В таблице представлена информация о российских ККС, расположенных вдоль трассы движения корабля. Желтым цветом помечены ККС, от которых принималась КИ. В качестве фактической дальности действия указана максимальная дальность, на которой хотя бы один из тестируемых НАП принимал КИ. Красным цветом выделены данные, не подтвержденные при переходе.
Характеристики российских ККС, расположенных вдоль трассы движения корабля.

На рисунках 7–11 показаны реальные зоны приема приемниками корабля от российских ККС:
- номинальная зона действия (в виде круга с заливкой);
- трек перехода в районе ККС с выделенным синим цветом участком приема КИ от данной ККС, начиная с первого и кончая последним получением КИ;
- окружность с радиусом, равным максимальной фактической дальности действия ККС.
Для части ККС фактическая дальность могла бы быть большей, если бы не происходило автоматического переключения НАП на более близкую ККС.

Рис 7. Зона действия ККС № 9 (Цыпнаволокский)

Рис 8. Зона действия ККС № 4 (Канинский)

Рис 9. Зона действия ККС № 24 (о.Олений)

Рис 10. Зона действия ККС № 3 (Мыс Стерлегова)

Рис 11. Зона действия ККС № 29 (Река Индигирка)
На рисунке 12 представлено поведение ошибки позиционирования в плане за все время перехода для НАП № 1. Красный цвет соответствует работе приемника в абсолютном режиме, синий и голубой цвета – работе в дифференциальном режиме, цифры в прямоугольниках на желтом фоне номеру ККС. Анализ рисунка 12 показывает, что использование КИ от ККС № 9, № 3, № 50, № 54 и № 62 повышает точность позиционирования данной НАП, использование КИ от ККС № 24 и № 29, практически не влияет на точность позиционирования, а использование КИ от ККС № 4 ухудшает точность позиционирования.

Рис 12. Поведение ошибки позиционирования в плане для НАП № 1 за все время перехода
Более наглядно поведение ошибок позиционирования в плане и по высоте для НАП № 1 при использовании КИ от ККС № 4 и ККС № 9 представлено на рисунках 13 и 14. Здесь показано изменение расстояний от ККС № 4 и № 9 до корабля. Видно, что использование КИ от ККС № 9 (Цыпонаволокский) более чем в 2 раза уменьшает ошибки в плане и по высоте, а использование КИ от ККС № 4 (Канинский) значительно ухудшает точность позиционирования. Причем заметно наличие значительной систематической составляющей ошибки в плане, примерно, 12 м и по высоте, примерно, 8 м. Одной из возможных причин данного явления может быть недостаточно точная геодезическая привязка приемной антенны ККС на момент проведения эксперимента. Следует отметить, что в период перехода ККС № 4 работала в экспериментальном режиме и не была введена в штатную эксплуатацию. В соответствии с рисунком 8 ошибка в плане при использовании КИ ККС № 9, примерно, в 2 раза меньше, чем в абсолютном режиме. Ошибка по высоте при использовании КИ ККС № 9 составляет от -7 м до 7 м, в то время как в абсолютном режиме она лежит в пределах от -5 м до 17 м.

Рис 13. Поведение ошибки в плане НАП № 1 при прохождении ККС № 9 (Цыпнаволокский) и ККС № 4 (Канинский)

Рис 14. Поведение ошибки по высоте НАП № 1 прохождении ККС № 9 (Цыпнаволокский) и ККС № 4 (Канинский)
В соответствии с рисунками 8 и 9 явной зависимости уменьшения величины ошибок позиционирования в зависимости от расстояния до ККС не прослеживается.
На рисунке 15 представлены итоговые характеристики точности в плане при приеме КИ от российских ККС. Приведены данные по трем НАП: № 1 — № 3. Крайний левый столбец на каждой диаграмме соответствует работе НАП в абсолютном режиме. Остальные столбцы характеризуют ошибку в плане при приеме КИ от конкретной ККС. Номера ККС обозначены по оси абсцисс. Столбцы на диаграммах, соответствующие работе одной и той же ККС с разными НАП, расположены строго друг под другом. Это позволяет получить общее наглядное представление о работе представленных НАП в дифференциальном режиме по российским ККС за весь переход.

Рис 15. Точность позиционирования НАП № 1-№ 3 при работе с российскими ККС
На основании проведенных исследований можно сделать некоторые выводы об эффективности использования российских ККС. Следует отметить, что буквальная оценка работы ККС по приведенным данным не совсем корректна, поскольку на фактор «абсолютный режим/дифференциальный режиме» накладывался фактор принудительного перевода НАП в работу по сигналам различных ГНСС. Также имеют место индивидуальные особенности самих НАП.
Анализ показывает, что с учетом вышеизложенного можно утверждать, что в большинстве случаев приемники, получая КИ от российских ККС № 3, 50, 54, 62, показывали лучшую точность, чем в абсолютном режиме.
Повышенный уровень ошибок при работе по сигналам ККС № 4 (Канинский), обусловлен тем, что во время перехода данная ККС еще не была введена в штатную эксплуатацию.
Ухудшение точности при использовании корректирующей информации от ККС № 24, расположенной на мысе Олений и принадлежащей ГГП, наблюдалось и в 2006 году в работе судового приемника МТ-102 (РИРВ) при переходе по Северному морскому пути пограничного сторожевого корабля «Карелия». В то время эта ККС была единственной работающей на побережье Северного ледовитого океана.
Повышенный уровень ошибок НАП № 3 при работе с ККС № 50 и № 62 в значительной степени объясняется особенностями алгоритма обработки измерений, реализованного в этом приемнике, из-за которого ошибки позиционирования данной НАП резко возрастали после смены режима движения судна. Такая смена режима движения имела место в периоды времени, когда НАП № 3 принимал КИ от указанных ККС.
Оснащение побережий Северного ледовитого и Тихого океанов локальными сетями ККС является важной задачей, поскольку имеется ряд приложений, требующих высокой точности позиционирования, которая не обеспечивается в абсолютном режиме позиционирования.
Поэтому, безусловно, необходимо разобраться, почему, как показал эксперимент, сигналы от ККС в ряде случаев не улучшают и даже ухудшают точность позиционирования навигационной аппаратуры. Возможно, для этого потребуются дополнительные экспериментальные исследования.
Отработана технология построения контрольной траектории на основании апостериорной обработки данных различных двухчастотных (L1, L2) ГЛОНАСС/GPS приемников с оценкой точности
Контрольная траектория движения используется при обработке результатов эксперимента для оценки точности позиционирования навигационной аппаратуры. По данным измерений двухчастотных приемников Leica, Triumph vs и Sigma, с использованием нескольких вариантов ПО в режиме постобработки строились траектории движения ФЦА этих приемников, представляющие собой набор декартовых или геодезических координат, привязанных к моментам времени. При построении траекторий движения ФЦА дополнительно использовались измерения двухчастотных приемников опорных станций Международной сети IGS, ближайших к трассе перехода, и других. Таким образом, на основании измерительной информации двухчастотных приемников и используемого ПО производилось тестирование этих приемников. Результаты тестирования подтверждались точностью построения траектории движения ФЦА каждого двухчастотного приемника.
Для построения траекторий движения ФЦА использовались программные продукты Topcon Tools (Topcon), Justin и Giodis (Javad), Koordinator и Traektor (ИАЦ КВНО), Leica GeoOffice (Leica). При обработке данных проводилась настройка опций ПО с целью достижения наиболее высокой точности.
Контрольная траектория определялась по совокупности траекторий движения ФЦА двухчастотных ГЛОНАСС/GPS приемников, с помощью специально разработанного алгоритма, учитывающего точности построения каждой траектории и реальные расстояния между антеннами на антенной площадке.
На основании обработки измерений, полученных в период стоянки в Мурманске 26.08.2011—28.08.2011, были определены оценки точности построения траекторий движения ФЦА всех двухчастотных приемников. Дополнительными исходными данными для этого являлись измерения с пунктов сети IGS-VARS (Vardoe, Норвегия), TRO (Tromsoe, Норвегия) и SVTL (Светлое, Ленинградская обл.). На первом этапе определялись контрольные координаты ФЦА, а также точность этих координат. Обработка данных проводилась в режиме «Статика» с последующим осреднением полученных данных.
На втором этапе по тем же исходным данным выполнялся расчет координат ФЦА, но уже в режиме «Кинематика» — в режиме, который в дальнейшем использовался для построения траекторий движений ФЦА.
На рисунке 16 представлено поведение точек траекторий движения ФЦА приемников Leica и Triumph, расположенных на одной антенне, относительно контрольных координат этой антенны, а на рисунке 17 — приемника Sigma относительно контрольных координат своей антенны. В таблице приведены итоговые оценки точности построения траекторий движения ФЦА в кинематическом режиме (RMS).

Рис 16. Разброс плановых координат ФЦА приемников Leica и Triumph относительно контрольной точки (26-27 августа, Мурманск)

Рис 17. Разброс плановых координат ФЦА приемника Sigma относительно контрольной точки (26-27 августа, Мурманск)
Разброс плановых координат ФЦА приемников Leica и Triumph относительно контрольной точки (26-27 августа, Мурманск)

Таким образом, точность построения контрольной траектории, полученная с использованием разработанной методики, составляет, примерно, 40…80 см в плановых координатах (RMS).
Проведена экспериментальная отработка технологии обмена данными между кораблем и ИАЦ КВНО, а также диспетчерским центром КБ НАВИС в Санкт-Петербурге
Практически на всем протяжении эксперимента «Севморпуть-2011» спутниковые средства связи были единственным доступным средством связи с Землей. В эксперименте они были использованы для следующих целей:
- автоматизированная передача данных о местоположении, скорости, курсе судна (возможно, других дополнительных данных, характеризующих навигационные условия) на сервер ИАЦ КВНО для отображения этой информации на сайте ИАЦ КВНО в реальном (с некоторой задержкой) масштабе времени в виде трека на фоне электронной карты, статистики маршрута и т.п.;
- передача на сервер ИАЦ КВНО текстовых сообщений, характеризующих состояние процесса, интересных событиях, промежуточных результатов испытаний и т.п. – для информирования руководства и выборочно для размещения на сайте ИАЦ КВНО в разделе, посвященном проекту в качестве новостей, голосовая связь с Землей для оперативного решения возникающих вопросов, согласования совместных действий, на случай экстренной необходимости.
В эксперименте, не считая штатных судовых средств, были задействованы два комплекта спутниковой связи:
- телефон Iridium 9555;
- терминал Инмарсат Mini-C.
Телефон Iridium использовался для выполнения перечисленных выше задач.
Терминал Инмарсат Mini-C входил в состав комплекта аппаратуры СН-5703, предоставленной для эксперимента КБ НАВИС. Он обеспечивал передачу данных о местоположении судна в диспетчерский центр КБ НАВИС в Санкт-Петербурге. Одной из задач эксперимента являлась экспериментальная отработка аппаратуры СН-5703, включающая передачу данных о местоположении корабля по сотовому каналу связи и через систему Инмарсат.
Во время эксперимента местоположение судна и пройденный на текущий момент трек отображались на электронной карте на странице сайта ИАЦ КВНО в режиме реального времени с некоторой задержкой (рисунок 18). На этой же странице помещались текстовые сообщения от участников эксперимента.
Таким образом осуществлялся контроль за проведением эксперимента, а все заинтересованные лица и организациям смогли следить за его ходом.

Рис 18. Отображение трассы корабля на сайте ИАЦ КВНО
С использованием аппаратуры СН-5703 передача данных по каналу Инмарсат производилась с момента подключения устройства на стоянке в Мурманске и продолжалась вплоть до 22 часов (UTC+0) 02.09.2012. Точка прекращения связи с кораблем через канал Инмарсат показана на рисунке 19.
Передача данных по сотовому каналу производилась аппаратурой СН-5703 с использованием встроенного GSM/GPRS-модема с внешней GSM-антенной.
Следует отметить, что в немногочисленных зонах доступности сотовой связи (GPRS) вдоль трассы перехода для передачи данных на сервер КБ НАВИС приоритетно использовался именно этот канал как имеющий меньшую стоимость трафика. Сотовая связь была доступна в районе портов Мурманска, Петропавловска-Камчатского и Невельска (о. Сахалин).

Рис 19. Точка прекращения связи с кораблем через систему Инмарсат
Заключение
В ходе эксперимента проведено тестирование более десяти образцов новейшей одно- и двухчастотной навигационной ГЛОНАСС/GPS аппаратуры разработки ведущих российских и зарубежных производителей – РИРВ, КБ НАВИС, Ижевский радиозавод, ООО «Радио Комплекс», НИИ КП, Leica GeoSystems, JNSS (Javad). При этом:
- тестируемые образцы навигационной аппаратуры на протяжении всего перехода работали в различных режимах навигации – по ГЛОНАСС, по GPS, в совмещенном режиме ГЛОНАСС + GPS. Абсолютный режим работы чередовался с дифференциальным;
- на протяжении всего перехода прием КИ производился более чем от двадцати ККС, включая зарубежные, расположенных по пути следования корабля вдоль побережья Северного ледовитого и Тихого океанов. Это позволило получить сравнительные оценки точности позиционирования навигационной аппаратуры при работе с различными ККС;
- экспериментальная отработка производилась в широком широтном от 35° с.ш. до 77.5°с.ш. и долготном от 33° в.д. до 170.5° з.д. диапазонах. Пройденное расстояние составило 10 000 км;
- эксперимент проводился в различных погодных условиях северных и восточных широт, при наличии метеоосадков – дождь, снег, туман, сильный ветер, 5-балльный шторм и др;
- в эксперименте отрабатывались передовые технологии спутниковой ГЛОНАСС/GPS навигации для решения задач мониторинга движения корабля и др.
Перечисленные факторы послужили естественным испытательным полигоном, который позволил провести отработку передовых ГЛОНАСС/GPS технологий навигации, управления, связи, мониторинга с использованием разработанных методик.
Полученные результаты могут быть использованы для доработки НАП и ее программно-математического обеспечения. Разработанные технологии могут быть использованы для построения высокоточных границ водных акваторий, для высокоточной привязки аппаратуры и оборудования при проведении водолазных работ, работ на морском шельфе при разработке полезных ископаемых, высокоточном определении координат затонувших кораблей и т.п.
 Испытания НАП, оценка условий спутниковой навигации
Испытания НАП, оценка условий спутниковой навигации
 Ионосфера
Ионосфера
 Принципы навигации
Принципы навигации
 Стандарт эксплуатационных характеристик открытого сервиса
Стандарт эксплуатационных характеристик открытого сервиса